Educational robots have immense potential to transform STEM education by fostering hands-on, interactive learning experiences (Barker et al., 2012). While they are often used to teach programming, robotics, and engineering concepts (Chiou, 2012; Karahoca et al., 2011), their application rarely extends beyond this scope to demonstrate the deeper connection between STEM disciplines. National standards (Next Generation Science Standards, n.d.) and pertinent reports (National Academy of Engineering and National Research Committee, 2014) emphasize the importance of integrated STEM education, calling for a more cohesive approach that connects biology, physics, engineering, and mathematics.
Research in integrated STEM education highlights its ability to boost student creativity, motivation, and engagement (Bryan et al., 2015). Similarly, educational technologies like robots and software applications have shown promise in enhancing problem-solving skills and creativity (Barker et al., 2012). However, there remains a significant gap in utilizing educational robots to illustrate the interdisciplinary connections between STEM subjects. To address this gap, we propose the use of Bio-Inspired Educational Robots (BIERs) intentionally designed to bridge biology and engineering in a hands-on, interactive way. These robots serve as innovative tools that engage students in integrative STEM learning and help educators reimagine how technology can foster deeper learning across disciplines (Whitman & Seth, 2025).
Bio-inspired Educational Robots are designed to replicate the structure, kinematics, behaviors, and motions of biological systems—such as a python’s jaw—allowing students to explore biological concepts while applying engineering principles simultaneously. For example, the primary purpose of the Snake-Jaw robot is to demonstrate the function of the quadrate bone, a unique biological adaptation that enables the snake to achieve an extended range of motion in its jaw (Lee et al., 1999). By boosting learner interaction and displaying direct, cause-and-effect relationships, these robots offer an engaging platform to visualize and understand interdisciplinary STEM concepts in both formal classrooms and informal learning environments, such as museums. Figure 1 displays two such robots—a Goldfish robot and the Snake-Jaw robot—being explored by museum visitors.
Figure 1
Museum Visitors Interacting with the Snake-Jaw Robot and the Goldfish Robot

The Snake-Jaw robot has evolved through multiple design iterations, beginning as a senior capstone project and progressing into a robust educational platform informed by user feedback. The initial design was bulky, heavy, and fragile, resulting in a successful proof-of-concept that was altogether impractical for educational use. However, using this original design as a foundation and resolving the size/weight issues, a “do-it-yourself” classroom version was developed. Along with the robot, a complete instruction manual and directory of supporting files were compiled, providing an engaging activity for students and teachers looking for a hands-on design project in the classroom. However, this design still had several issues, notably the requirement of a laptop, as well as the overall fragility of the structure and skull. To remedy this, an “advanced” version of the Snake-Jaw robot (which is described in this paper) was created to be larger, more robust, more interactive, and to operate independently of external technology like a laptop or tablet.
The current design of the Snake-Jaw robot integrates refined mechanical, electrical, and user-interface components to enable both demonstration and interactive learning modes. The robot consists of a 3D-printed snake skull—including an upper skull, two quadrate bones, and two lower mandibles—actuated with servo motors to perform the opening, closing, striking, and swallowing motions of the snake. The structure and motion of the robotic skull were validated with K–12 and museum educators to ensure educational accuracy. The skull is mounted on an acrylic base that houses the electronics. At the front of this base is a set of controls (including buttons and sliders) that allow the user to control and interact with the robot. The front of the base also contains digital screens where the user can view numerical and visual outputs (e.g., joint angle, resulting internal mouth volume, etc.). The robot has two modes of operation: demo mode and interactive mode. In demo mode, the robot will repeatedly perform a full “eating” demonstration. This begins with a striking motion followed by a swallowing motion. In interactive mode, the user can either use the buttons to demonstrate pre-programmed, biologically-accurate motions of the snake’s jaw, or use the sliders to independently move individual joints on the jaw to see how the angle impacts the range of motion, internal volume, etc. Users can also swap the bones of the robotic jaw and discover how different bone/linkage lengths affect the snake’s motions. By giving the user direct, interactive control over the robot’s structure and motions—while also providing relevant input and output information—the system enhances engagement (Whitman & Seth, 2025) and can potentially support the learning of cause-and-effect relationships. Additionally, the robot’s flexible design allows it to adapt to both formal and informal educational contexts, as well as to different student and teacher levels, ensuring an engaging and integrative learning experience for all users. Figure 2 gives the current design of the Snake-Jaw robot.
Figure 2
Snake-Jaw Bio-Inspired Educational Robot

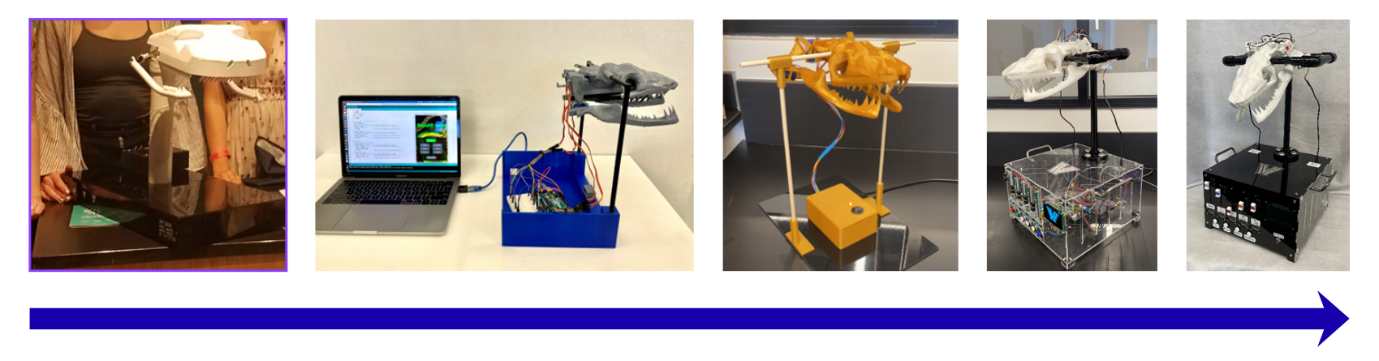
To ensure the robot’s design effectively supports engagement and learning, a systematic usability study was conducted in a museum, and the design was iteratively revised based on the outcomes (Whitman & Seth, n.d.). The study was implemented at a local museum (Figure 1) where visitors were allowed to freely interact with the robot as desired. Once they had concluded their engagement with the robot, visitors were asked to complete a short survey, measuring the robot’s overall usability using the SUS scales (Brooke, 1996), as well as collecting optional, open-ended feedback about the robot’s strengths and weaknesses. This data was used to generate and implement design improvements until the robot achieved high usability ratings in its final design iteration (see Figure 2). Notably, improvements made to the robot during and after this study were: 1) using black acrylic instead of clear acrylic for the case, 2) using high contrast labels, buttons, and sliders on the front panel, and 3) color-coordinating the sliders to their respective controlled joint. Figure 3 shows the design evolution of the Snake-Jaw robot.
Figure 3
Evolution of the Snake-Jaw Robot
The design and implementation of the educational robot are grounded in two key theoretical frameworks: integrative thinking and Bayesian causal learning. These frameworks support deep conceptual understanding by encouraging students to explore connections across disciplines and actively manipulate the system to observe direct cause-and-effect relationships.
Integrative thinking promotes the ability to connect and synthesize concepts from multiple STEM disciplines, allowing students to see how biology, engineering, and mathematics interact in complex systems (Bryan et al., 2015). With the Snake-Jaw robot, students learn about the primary function of the quadrate bone, a unique biological adaptation that enables snakes to achieve an extended range of jaw motion (Lee et al., 1999). This biological concept is paired with engineering and physics principles, where students explore how the number of joints and linkages in a mechanism affects its range of motion, force-torque relations, and kinematics/dynamics. Students also apply mathematical concepts such as geometry, coordinate systems, area, and volume to analyze and understand a complex biological system, bridging multiple disciplines with hands-on learning.
Bayesian causal learning explains human cognition through probabilistic models based on Bayes’ rule, emphasizing how learners infer explicit cause-and-effect relationships rather than forming simple associations (Holyoak & Cheng, 2011). According to this framework, people infer explicit cause-and-effect relationships through two processes: parameter learning, where they refine their understanding of existing relationships, and structure learning, where they identify new causal connections (Jacobs & Kruschke, 2010). Learner intervention—the ability to interact directly with a system and observe how actions affect outcomes — plays a fundamental role in this process (Steyvers et al., 2003). Lagnado et al. (2007) identify intervention as a critical component for efficient causal learning, enabling learners to connect actions with outcomes and solidify their understanding. With the Snake-Jaw robot, learners can see how the quadrate bone, number of joints, angular displacement of a joint, and length of jaw links directly affect the snake’s range of motion, force-torque relations, and kinematics/dynamics.
This work directly aligns with the AECT convention’s vision, as the presented robot is a new form of educational technology that can be integrated with current pedagogy to create interactive and engaging lessons that explore and develop integrative thinking in the students. During the 25-minute concurrent session where this work was presented, the Snake-Jaw robot was introduced. The design (including the purpose and evolution), control, and connection to integrative thinking and Bayesian causal learning were described. After that, the participants were guided through a mock interactive biology “lesson”, demonstrating how the robot can be used to teach about biological concepts in an engaging way. Finally, using the Technological Pedagogical Content Knowledge (TPACK) framework (Mishra & Koehler, 2006), participants were asked to brainstorm how the robot might be implemented into their own lessons or classes. For Technological Knowledge (TK), questions included: what technical skills would a teacher need to use this robot effectively? For Content Knowledge (CK), questions included: what STEM content could this robot help teach? For Pedagogical Knowledge, questions included: what teaching strategies could help students learn with this robot? Finally, participants were asked to contemplate the benefits, risks/challenges, unintended consequences, and next steps for the implementation of the Snake-Jaw robot into classrooms. This session highlighted the robot’s ability to teach interdisciplinary STEM concepts through interactive, hands-on learning while demonstrating its accessibility for students of all levels. The goal was for all participants to leave the session with new knowledge of educational robotics and their applications in both formal and informal settings.
This material is based upon work supported by the National Science Foundation under Grant No. 2422459. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author (s) and do not necessarily reflect the views of the National Science Foundation.
The authors thank the Delaware Museum of Nature & Science for providing their aid and support in this research, as well as the facility to test the robot.