The widespread popularity of makerspaces has boosted the rise of making practices in pre-K12. More schools are incorporating making activities into their curricula, either through informal or formal mediums of instruction. Despite the wide acceptance of makerspaces in schools, makerspaces lack a pedagogical approach focusing on making activities that can be aligned with the school curriculum. While the notion of makerspace seems modern, its framework is woven through educational learning theories of constructivism and constructionism, both emphasizing providing conducive learning environments to learners by engaging in hands-on learning activities through making (Hmelo-Silver et al., 2007; Palincsar, 1998). Makerspace practices are grounded within the theoretical tenets that led to the belief and have proven to develop problem-solving and critical thinking skills among learners (Karagiorgi & Symeou, 2005). Such potential in makerspaces has fuelled the momentum of the maker movement in many schools to incorporate making in their schools with a strong belief that making can teach STEM concepts in more concrete and innovative ways (Bevan, 2017; Honey & Kanter, 2013; Martin, 2015; Quinn & Bell, 2013). However, a lack of a pedagogy is one of the key quests to formalize the makerspace culture in schools that still needs investigation.
In this paper, we present a design of problems to anchor a makerspace learning environment woven in a problem-based learning framework for catalyzing the learning process. Problem-based learning approaches harmonize with makerspace cultures that foster learning environments by engaging learners in hands-on learning; both emphasize student-centered learning goals where learners construct their own knowledge through active participation in meaningful activities. Problem-based learning seamlessly integrates well with makerspaces, as both align with theoretical notions. To date, only a handful of studies have utilized the PBL approach in makerspace learning. In addition, the use and implementation of the PBL approach in makerspace activities remain unclear. Many studies have integrated makerspace learning into existing school curricula or capstone projects. However, there is a need to understand the impact of maker activities when integrated within the school settings (Schlegel et al., 2019). One of the challenges in implementing makerspace activities successfully is the distinct difference between the learning environments of makerspaces and schools. Makerspaces are known for their informal structure, where learning is a byproduct of hands-on activities such as artifact creation and discovery-based learning. In contrast, schools typically follow traditional, standardized instruction and assessment methods, which may lead to conflicts in pedagogical approaches in Makerspaces.
While the capability of makerspaces is widely acknowledged in transforming education, the design of problems suggested in this paper based on PBL frameworks may attempt to enhance the actual potential of makerspace learning environments through guided instruction, which can benefit learners in constructing their knowledge by solving real-world problems and challenges.
The design and development of problems and challenges for integration into a PBL-based makerspace were carried out by a diverse team that brought unique skills and expertise to create a robust design. This design phase involved a team of four members and was part of a larger project aimed at understanding the role and effectiveness of PBL-supported makerspaces in enhancing middle school students' critical thinking skills. The interdisciplinary expertise of the team members significantly contributed to the development of problem tasks for implementing the project in middle school after-school science programs. The team included one doctoral student, two faculty experts, and an undergraduate engineering student, all of whom collectively contributed their distinct knowledge and expertise.
The first author is a doctoral student and is in the third year of her PhD studies in instructional technology at a public university in the Midwest U.S. in the Education Technology Research and Assessment (ETRA) department. Her focus areas include problem-based learning in makerspace learning environments. She (a doctoral student) served as a research assistant under the supervision of a faculty expert (the second author). She developed and designed the problem tasks to integrate them into makerspace learning environments to understand how problem tasks based on PBL frameworks can encourage problem-solving skills and enhance learning among middle schoolers.
The second author is a faculty expert and a professor in the Education Technology Research and Assessment department at a public university in the Midwest U.S. for the past 19 years. Her expertise is developing intelligent tutoring systems to promote scientific argumentation, equity pedagogy in teaching and learning, emerging technology integration in teaching and learning, and computer-supported collaborative learning. Faculty experts guided and mentored in reviewing and refining the design at various levels. Faculty experts provided guidance right from the ideation of the project, starting with offering real-world challenges that can mimic realistic problems. The focus was placed on the alignment of theory and activities to offer learning opportunities to middle school students. Further, another faculty expert from Mechanical engineering and an undergraduate engineering student offered insights and guidance from the engineers’ perspective, which helped in refining the problems to make a better relevance for STEM education and connect with STEM concepts.
The design process went through several stages and a period of a semester, beginning with the initial idea of making learning relevant for middle school standards.
One of the initial challenges that our design team experienced is finding relevant pedagogy to teach problem-solving to middle school students that can mirror real-world issues. Moreover, the problem should be relevant to incorporating STEM-related disciplines within makerspace learning environments. Identifying and crafting the problem scenarios was the initial struggle that our team experienced in integrating into the maker space learning environment. Thus, the very first question was that is our problem is well-crafted or not? Within that purview, the central notion behind designing the problems was developing and replicating real-world issues that could challenge students and enable them to tackle such tasks. Another association that we aimed to look out for is connecting problems with community issues. Providing opportunities that allow students to solve problems that exist in their communities could offer a great sense of achievement among students. Furthermore, students can find an affiliation with their communities which is a motivating factor for engaging them in exploring the solutions. Design experts advocate that engaging students in communities related contextual learning helps students build a deeper understanding of course content or topic because of real-world exposure of meaningful local or global issues through hands-on learning (Hou, 2009; Butin, 2006).
Moreover, while designing high-quality problem-solving tasks that effectively stimulate learning, it presents a significant challenge for instructors. In problem-based learning (PBL), well-crafted problems serve as the catalyst for driving inquiry and encouraging deeper exploration, which demands careful planning and thoughtful implementation. To successfully integrate PBL frameworks into instructional design, it is essential to incorporate key PBL characteristics that promote engagement, challenge students, and motivate them to actively pursue solutions. The problem itself acts as a learning stimulus, sparking inquiry and critical thinking. Therefore, developing an effective problem task requires a structured approach aligned with the core learning objectives of PBL, ensuring that the task is both engaging and educationally rigorous. Table 1 summarises the problem features that will be utilized as a basis for framing a well-crafted problem inspired by Tan-Oon-Seng and Tee's (2003) criteria, which is used as a questionnaire to gain the expert’s opinion. Tan-Oon-Seng and Tee (2003) outlined the features of design or crafting problems in Problem-based Learning (PBL), which provides a foundational framework for designing effective problems and challenges that can promise in enhancing student’s learning. A well-designed problem should reflect real-world relevance, connecting learners to authentic challenges that make their learning meaningful and applicable. Problems are typically open-ended, allowing for multiple solutions and encouraging critical thinking and creativity. They must also align with specific learning outcomes, ensuring that students achieve both cognitive and skill-based objectives. A key feature is the cognitive challenge posed by the problem, which motivates learners to analyze, synthesize, and evaluate information actively. Additionally, the problem designs should be crafted, maintaining progress from beginners’ level to advanced challenges through embedding simpler tasks in the complex ones, ensuring gradual and incremental success and learning outcomes. Finally, embedding reflective thinking is an integral part of PBL design, ensuring reinforcement of metacognitive skills, enabling students to evaluate their own progress over the learning period and improve their cognitive abilities.
This framework is widely used across many educational contexts for designing problem challenges in PBL curricula, including STEM education and makerspace environments, to ensure that learning is engaging, rigorous, and contextually meaningful.
Table 1
Rubric/Criteria for the Design of PBL Framework in Makerspace Science Class Activity
Problem domain | Students will be given a real-world challenge with a case scenario in which problem is divided in stages and need to be solved in step-by-step manner. Students are tasked with designing an automated home security system for a community that frequently experiences power outages and lacks adequate street lighting to secure their residence from crime and burglaries. | |
Problem features | Issues to address | Our case study (highlight options that applies) |
Characteristics | (a) What is real-world relevance of the problem? (Check/select the option) | (a) Yes, the problem is realistic (b) No, it is confined to theoretical aspects and not relatable to real-world situation |
(b)What is the curriculum relevance? (select all that applies) | (a) Problem-solving (b) team skills (c) computational thinking (d) lifelong learning | |
(c) What is the level of difficulty of the problem? Note: Level of difficulty refers how challenging the task is for individual or group to complete, often requires skills, prior knowledge, and resources. (For example, writing a simple program to turn on an LED might be easy for students familiar with Snap! coding but difficult for those who have never coded before.) | (a) Low (b) Moderate (c) Moderately difficult (d) Difficult | |
(d) What is the level of complexity of the problem? | (a) low (b) Medium (c) High | |
(e) Does the problem call for the integration of multiple knowledge domain/topics from different discipline? | (a) Yes (b) No | |
(f) Is the problem open-ended? | (a) Yes (b) No | |
(g) Does it call for final product? | (a) simple artifact (b) Home automation security solutions | |
Context | (a) Is the problem unstructured(ill-structured)? | (a) Yes (b) No |
(b) Does the problem activate inquisitiveness/curiosity? | (a) Yes (b) No | |
(c) Is the problem offering sense of ownership? | (a) Yes (b) No | |
(d) Does the problem elements show novelty? | (a) Yes (b) No | |
(e) Does the problem drive motivation for exploration? | (a) Yes (b) No | |
Learning environment and resources | (a) Does the problem stimulate collaborative inquiry? | (a) Involves Individual exploration for the partly problem solution (b) Group inquiry by engaging in team assignment (c) Both (a) and (b) |
(b) What is the extent of guidance is needed for using learning resources to develop problem solution? | (a) High guidance using hands on guided practice sessions and step-by-step instructions (b) Low guidance only by providing instructions | |
(c) What kind of teaching material, information resources are utilized? | (a) Printed hands out of instructions with steps by step procedure (b) Video Tutorials and PPT demonstrations (c) Instructor LED-workshops (d) All of the above | |
(d) Will field/laboratory work be incorporated? | (a) yes (b) no | |
(e) What kind of teaching strategies are integrated to provide well-rounded learning experience? Note: (a) Unplugged activity in this study refers where student’s will be first doing the problem-solving and thinking with a pen and paper in their journal book. Instructor will provide a paper prints of set of block codes (such as conditional loops, event blocks, etc.,) which students will be choosing logically and sequentially and pasting in their journal workbook to make a program running. It’s a brainstorming activity before final execution on coding interface. (b) Plugged activity in this study refers to an activity which will be taken place after unplugged activity in which students finally execute their coding and running a program on a Snap! programming interface and simulating the codes with Hummingbird robotic kit to perform the problem task, such as “blinking single colour LED lights turn on and off each second.” | (a) Unplugged (b) Plugged (c) Both | |
Presentation | (a) Do we use a problem scenario? | (a) Yes (b) No |
(b) Should it be short scene or multiple scene? | (a) Short scene (b) Multiple scene | |
(c) How is the problem solution presented? (Tick all that applies) | (a) artifact (b) Case write-up (c) 3D model using electrical devices (d) Simulating coding and sensors to develop real-world solution (e) c and d | |
(d) Are students writing journals and reflections as part of problem investigation? | (a) Yes (b) No | |
Note: Adapted from Tan-Oon-Seng (2003), Problem-Based Learning Innovation: Using Problems to Power Learning in the 21st Century, pp. 87
The foundational principles of PBL are that learning is situated in a problem, and the problem navigates through the solution finding by identifying the information that they know, how new information is associated with prior knowledge, and finding out the viability of new conceptions. This is one of the essential aspects of PBL that offers holistic learning by engaging students in an active role and encouraging their thinking skills (Radcliffe & Kumar, 2016; Drake & Long, 2009; Boud & Feletti, 1991; Schmidt, 1983; Barrows & Tamblyn, 1980). The nature and characteristics of PBL approaches center on problems, which are the starting point of learning, and problem-solving involves the application of cross-disciplinary knowledge, which is another key feature in PBL curricula (Seng, 2000).
We selected a real-world problem scenario involving power outages and dark residential communities, which can increase the risk of theft and crime. The scenario was broken down into smaller, interconnected episodes, each leading to the final challenge. Students address these episodes step by step, allowing them to gradually grasp related concepts without feeling overwhelmed by a single large task. This episodic approach enables progressive learning and enhances their problem-solving abilities. The instructional design integrates smaller, interconnected episodes, each contributing to a larger problem-solving challenge. This episodic approach not only scaffolds learning but also prepares students to tackle the final project, a comprehensive problem-solving task requiring the application of all previously learned concepts.
The four-day after-school makerspace program integrates Problem-Based Learning (PBL) by engaging students in hands-on problem-solving, collaborative exploration, and reflective practices. On Day 1, students are introduced to the overarching problem scenario, "Moving into a new community." They begin by sketching their dream house and transforming their designs into 3D prototypes using materials like cardboard. This initial activity encourages creativity, teamwork, and idea-sharing, culminating in reflective journaling. On Day 2, the focus shifts to addressing a power outage by designing a basic lighting system using single-color LEDs, progressively advancing to programming light sensors to control multiple LEDs. This introduces students to foundational programming concepts. On Day 3, the challenge intensifies with the task of creating an intruder alert system. Students incorporate a distance sensor to trigger LED lights based on the object's proximity, further refining their programming and circuit-building skills. Day 4 builds on this by tasking students with developing an escape plan for emergencies. This involves integrating a servo motor, a sound sensor, and LED lights to create a functional alarm system with audio and motion features, simulating a complete safety solution.
Each day includes scaffolded practice and exploration tasks, allowing students to master concepts such as basic circuits and sensor integration before applying their skills to increasingly complex challenges. Students reflect daily on their learning experience, highlighting problem-solving strategies, teamwork, and creativity. This iterative design ensures both cognitive (e.g., learning STEM concepts) and affective (e.g., building self-efficacy) goals are achieved, aligning the program with makerspace objectives. The incorporation of Snap! Programming throughout helps students link theoretical concepts with practical robotic solutions (See Appendix - Table 2 at the end summarizes the four-day problem task activities in makerspace after school science program).
This design of problems adopts a structured approach to teaching middle school students’ robotic concepts in a Problem-Based Learning (PBL) environment, gradually increasing task difficulty to align with Bloom's Taxonomy. Initially, foundational concepts, such as using single-color LED lights, are introduced to establish basic understanding (Remember and Understand levels of Bloom's Taxonomy). As students gain proficiency, more complex tasks, including programming TRI-Color LED lights, sensors, motors, and servos from the Hummingbird robotics toolkit, are introduced. These components are presented as inputs and outputs, with each session building on previous knowledge via developing higher-order thinking skills. By gradually advancing from simpler to more challenging activities, students’ progress through Bloom's levels, from applying and analyzing individual components to evaluating and creating complex robotic solutions, such as students developing automated home security systems in this study.
The design of problems also utilizes a gradual approach of scaffolding as guided instructions within a student’s zone of proximal development (Vygotsky, 1978) that offer students resources and knowledge that are required for them to increase their skills to address the problem task. To further support students within their zone of proximal development (ZPD), each lesson episode includes scaffolded tutorials and guided support. These instructional aides are designed to provide students with just enough assistance to complete tasks that they might struggle to accomplish independently, while still encouraging autonomy and exploration. By guiding students through smaller episodes that build upon each other, we ensure they are working at the edge of their capabilities, gradually mastering each component before moving to the next level of difficulty. This aligns with Vygotsky's ZPD by allowing students to achieve learning outcomes through structured support, reducing assistance as their competence grows. This approach supports students as they progress from simple to complex concepts, fostering both skill development and confidence in their problem-solving abilities.
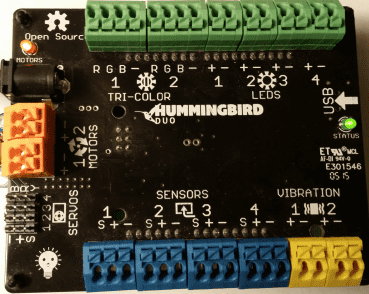
As a team, we aimed to develop the design of problems that enable students to navigate through complex problems in the STEM area by providing them with the opportunity to apply problem-solving and critical thinking skills. Papert (1993) advocates that the use of educational robotics in education can offer hands-on learning opportunities to learners. Moreover, research demonstrates that the positive impact of integrating robotics challenges can improve students’ cognitive abilities, maths, and science content knowledge as well (e.g., Darmawansah et al., 2023; Zhang et al., 2024; Arafat et al., 2024; Hiskens et al., 2011; Nugent et al., 2009). We employed block-based coding using Snap! Programming alongside the Hummingbird robotic kit to introduce the basics of robotics to middle school students in an after-school science program. The Hummingbird robotic kit is a product of Birdbrain Technologies, which originated at Carnegie Mellon University and was funded by the National Science Foundation (NSF). Hummingbird robotic kit offers enormous and fascinating science projects from the age of 8 years and onwards. Moreover, Hummingbird course contents encourage interdisciplinary projects that allow students to gain learning and get familiar with concepts from multiple domains. Also, pertaining to meet the standards of Next Generation Science Standards (NGSS). Hummingbird robotic kit contains LED lights, servos, motors, sensors, etc. Figure 1 displays the hummingbird robotic kit components, and Figure 2 shows the hummingbird controller, which is connected via USB to the computer device.
Figure 1
Hummingbird Kit Content

Figure 2
Hummingbird Controller
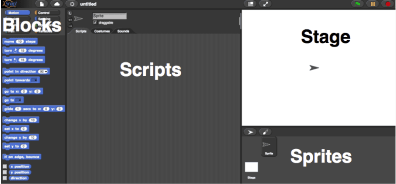
To activate Hummingbird robotic technology, a programming language Snap! is used. Snap! is a visual programming language that uses a drag-and-drop interface with visual block-based coding, making learning more intuitive, as whatever changes are made to the code can instantly reflect in the hummingbird robot functionality. Also, it’s a web-based browser which makes it convenient for users, especially a hassle-free access to school students (See Figure 3., showing Snap! block-based coding interface). The right-hand panel with “blocks” displays various colors of block codes, which are used to make coding run the command and develop a program. These blocks are simply dragged to the Script area, where the code can be written. The stage area is used when a user wants to see the movement or motions of a character, also called Sprites (animated characters), such as a boy playing football or a cat walking.
Figure 3
Snap! Programming Interface
To start the hummingbird robotic kit, it requires connection to the computer device using a USB cable, which then opens the BirdBrain Robotic Server application to launch the Snap! programming. Once the Snap! programming interface is open for access, which allows users to create block-based coding to control hummingbird outputs (LED lights and motors) and inputs (sensors). Snap! programming offers different categories in the Menu section (see Figure 4. Menu of Snap! programming) for selecting block codes for output and input devices, such as the motion category for servos, motors for movement direction, Look blocks for LED and TRI-color LED lights, with additional alternatives for sprite (animated character) and speech. The scripts in Snap! Programming sends commands to output devices to perform or make something happen, such as turn on the LED lights to maximum brightness. On the other hand, input devices (sensors) send information to Snap! for decision making or controlling output devices (LED lights and motors). Figure 5 demonstrates the light sensor controlling the two different single-color LED lights, and fig 6 shows the Snap! programming code for light sensors controlling LED lights.
Figure 4
Menu Categories in Snap! Programming
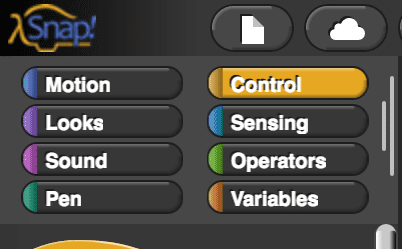
Figure 5
Two Single-Color LED

Figure 6
Snap! Code for Light Sensor Controlling LED Lights

The Delphi technique was employed as a systematic approach to gather and integrate expert feedback, which is especially relevant when refining instructional designs for complex educational frameworks like PBL. Therefore, we applied the Delphi technique after developing the final PBL design but before its implementation in a pilot program.
Applying the Delphi technique to refine the design of problems for PBL-based makerspaces in the post-design phase and prior to pilot implementation can provide valuable insights through expert feedback. While there are various ways to utilize the Delphi method, this approach enables us to systematically refine and enhance our PBL design, ensuring its effectiveness and readiness before launching the pilot program in middle school.
The outset of the Delphi technique began in the 1930s in academia and has been found lucrative in educational settings, such as preparing guidelines and standards. Educators found the Delphi technique very useful in developing curricula that can emphasize enhancing learners’ experience and providing leverage to prepare students for their future careers. The goal of adapting Delphi techniques will encourage educators to align their educational goals with curriculum development (Green, 2014). Scholars, for instance, Judd (1972) also underscore the value of the Delphi technique in many areas such as curriculum planning and educational objectives in education. The method used in Delphi is via collecting data such as feedback from an expert panel seeking their opinions to make informed decisions, and crucial insights can help in determining future plans (Helmer, 1966).
To implement the Delphi technique in this design study, a panel of four experts was carefully selected. The panel included a professor specializing in education and technology, an assistant professor from the engineering field, a junior high school teacher with expertise in STEM, and a teacher with experience in STEM and medical science education for grades 6-8. Each expert was highly skilled and experienced in the STEM field, with extensive involvement in research projects focused on problem design within STEM education. Additionally, all panel members had substantial experience in designing PBL units and developing problem-solving cases for academic settings.
In this design study, we applied the Delphi technique to reach the expert consensus on the design of problems in PBL-based makerspace learning environments. Expert feedback and opinions were collected over one round to refine the design of the problem until reaching an acceptable level of agreement. The literature suggests that the Delphi process can be continued theoretically with multiple rounds until consensus is reached or achieved. As a result, Delphi analysts can conduct more rounds if they believe they need more iterations in the feedback for further clarity or to refine the consensus. In this study, before starting the Delphi rounds, we defined a priori that achieving a 75% level of agreement among experts would indicate sufficient consensus to proceed without additional rounds. This threshold aligns with prior studies, where similar consensus levels were set to ensure reliability while acknowledging expert diversity (Hsu & Sandford, 2007; Diamond et al., 2014). The acceptable threshold varies widely considering as low as 50% to as high as 97%. On average, many studies consider 75% as an acceptable agreement as a practical standard for reaching a consensus (Diamond et al., 2014; Foth et al., 2016). There is a significant variation in what is accepted as consensus, which may also depend on the context’s settings and the subjective nature, which are deciding factors in establishing the threshold for consensus in advance.
We observed during the first round that the expert panel reached a consensus threshold of 52% for strong agreement, with the remaining 48% falling within moderate consensus. One of the key considerations in the Delphi process is establishing a priori criteria to determine when to terminate further iterations (Diamond et al., 2014). Although we did not initially set a strict predefined criterion for limiting the number of rounds, the results of the first round provided a meaningful level of agreement. While 52% of the criteria met strong consensus, the remaining 48% showed moderate consensus, indicating areas for refinement rather than the need for additional rounds to seek further convergence. Given that expert feedback did not present major disagreements or conflicting viewpoints, further rounds were deemed unnecessary, as they were unlikely to yield significant shifts in agreement. Additionally, research suggests that moderate consensus can still provide actionable insights for implementation (Keeney et al., 2010). Therefore, we determined that the primary objectives of the Delphi process had been met, allowing us to proceed with integrating these findings into the pilot study phase.
In this study, standard deviation is applied to understand the level of dispersion and allows for measuring the level of consensus variation among the expert panel on various criteria to design problems framed on the PBL framework. Standard deviation is considered the most common approach of descriptive statistics and as a measure of dispersion (Holey, 2007; Von Der, 2012; Giannarou & Zervas, 2014). Mean rank was employed to calculate the standard deviation as a means of assessing the consensus among expert panels. While the literature demonstrates the use of mean, median, and mode as the most appropriate measures of central tendency in Delphi studies, the median is considered the most recommended due to its robustness against the outliers (Shang, 2023). Despite these recommendations, we opted for the mean rank to calculate standard deviation, which allowed for a more precise measurement of variation in expert rankings. Although the mean is typically suited for interval rather than ordinal data, it provided a clear, quantitative insight into the extent of agreement, with low standard deviations indicating strong consensus. Thus, while the median is the standard approach for Delphi studies, the mean and standard deviation offer a practical and interpretable way to assess agreement among experts and guide further refinements in the problem design.
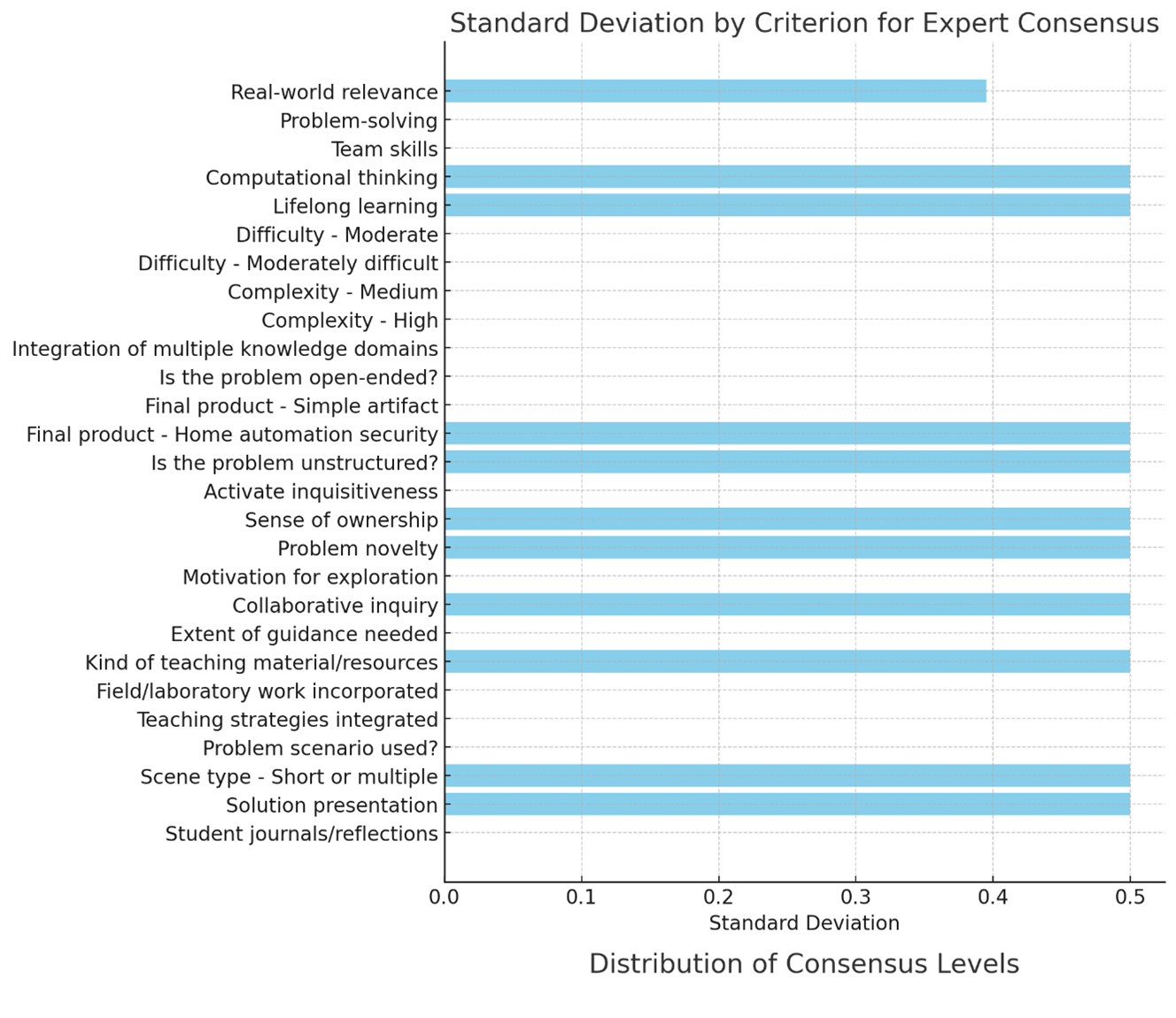
Further, to calculate the mean rank, first, we applied a ranking approach to prioritize PBL features based on expert votes. Each expert was asked to evaluate a list of PBL criteria through a questionnaire used as features in crafting PBL problems, and their rankings were determined according to the number of votes each criterion received. The criterion with the highest number of votes was assigned rank 1, indicating it as the most preferred by the experts, followed by the criterion with fewer votes, which were assigned ranks in descending order (2, 3, 4, etc.). This voting and ranking system provided a clear structure for identifying the most valued criterion as perceived by the expert panel. This process gave us the mean rank for each criterion. To further quantify the level of consensus among the experts, we calculated the standard deviation of the ranks for each criterion. Low standard deviation values indicated strong agreement among the experts, while higher values suggested more variability in the rankings, highlighting areas where perspectives diverged. Table 3 displays standard deviations for each criterion, and Figure 7 shows the visual graphs of standard deviations for each criterion and consensus agreement.
Table 3
Standard Deviation for Each Criterion/Characteristic Based on Mean Ranking
Criterion | Sub-criterion | Standard Deviation | Consensus level |
Characteristics | Real-world relevance of the problem | 0.395 | Strong consensus, little variation |
Curriculum relevance | |||
(a) problem solving | 0 | Complete agreement among experts | |
(b) team skills | 0 | Complete agreement among experts | |
(c) computational thinking | 0.5 | Moderate consensus—some variation | |
(d) lifelong learning | 0.5 | Moderate consensus—some variation | |
Level of difficulty | |||
(a)Low | Not enough votes to calculate deviation (0 votes) | Not applicable | |
(b)Moderate | 0 | Complete agreement among experts | |
(c) Moderately difficult | 0 | Complete agreement among experts | |
(d) Difficult | Not enough votes to calculate deviation (0 votes) | Not applicable | |
Level of complexity | |||
(a)Low | Not enough votes to calculate deviation (0 votes) | ||
(b)Medium | 0 | Complete agreement among experts | |
(c) High | 0 | Complete agreement among experts | |
Integration of multiple knowledge domains | 0 | Complete agreement among experts | |
Is the problem open-ended? | 0 | Complete agreement among experts | |
Does it call for a final product? | |||
(a) Simple artifact | 0 | Complete agreement among experts | |
(b) Home automation security solutions | 0.5 | Moderate consensus—some variation | |
Context | Is the problem unstructured? | 0.5 | Moderate consensus—some variation |
Does the problem activate inquisitiveness? | 0 | Complete agreement among experts | |
Sense of ownership | 0.5 | Moderate consensus—some variation | |
Does the problem show novelty? | 0.5 | Moderate consensus—some variation | |
Does the problem drive motivation for exploration? | 0 | Complete agreement among experts | |
Learning environment and resources | Collaborative inquiry | 0.5 | Moderate consensus—some variation |
Extent of guidance needed | 0 | Complete agreement among experts | |
Kind of teaching material/resources utilized | 0.5 | Moderate consensus—some variation | |
Field/laboratory work incorporated | 0 | Complete agreement among experts | |
Teaching strategies integrated | 0 | Complete agreement among experts | |
Presentation | Problem scenario used? | 0 | Complete agreement among experts |
Short scene or multiple scenes? | 0.5 | Moderate consensus—some variation | |
How is the problem solution presented? | 0.5 | Moderate consensus—some variation | |
Students writing journals/reflections | 0 | Complete agreement among experts |
Figure 7
Bar Chart Depicting the SD by Criterion Showing Distribution of Consensus Levels
In addition to analyzing mean ranking and standard deviation, we applied Interquartile Range (IQR) to further assess the dispersion of expert consensus on each PBL design criterion. While mean and standard deviation provide a general sense of agreement and variability, IQR is particularly useful in Delphi studies as it helps identify the spread of responses around the median, minimizing the influence of extreme values or outliers (Keeney et al., 2010). By applying IQR, we gained a more nuanced understanding of how experts' opinions varied across the 21 criteria, distinguishing between highly stable areas of agreement and those requiring further refinement.
Upon performing the Interquartile Range (IQR) analysis, we validated the consensus distribution across the 21 criteria used for refining problem scenarios in the PBL-supported makerspace (See Table 4). The key findings are:
Strong Consensus (IQR ≤ 0.5): 18 out of 21 criteria met a strong consensus, confirming their reliability and agreement among experts.
Moderate Consensus (IQR > 0.5): Only 3 criteria exhibited moderate consensus, indicating areas where further refinement and validation through pilot testing are necessary
Table 4
IQR Assessment–Supporting Table
Criteria | Mean Rank | Q1 | Q3 | IQR | Consensus Level |
Real-world relevance | 1.25 | 1 | 1.5 | 0.5 | Strong Consensus |
Curriculum relevance | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Level of difficulty | 1.00 | 1 | 2.0 | 1.0 | Moderate Consensus |
Level of complexity | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Integration of multiple knowledge domains | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Is the problem open-ended? | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Does it call for a final product? | 1.25 | 1 | 1.5 | 0.5 | Strong Consensus |
Is the problem unstructured? | 1.25 | 1 | 1.5 | 0.5 | Strong Consensus |
Does the problem activate curiosity? | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Sense of ownership | 1.50 | 1 | 2.0 | 1.0 | Moderate Consensus |
Does the problem show novelty? | 1.50 | 1 | 2.0 | 1.0 | Moderate Consensus |
Does the problem drive motivation? | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Collaborative inquiry | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Extent of guidance needed | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Teaching material/resources utilized | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Field/laboratory work incorporated | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Teaching strategies integrated | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Problem scenario used? | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Short scene or multiple scene? | 1.25 | 1 | 1.5 | 0.5 | Strong Consensus |
How is the problem solution presented? | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
Students writing journals/reflections | 1.00 | 1 | 1.0 | 0.0 | Strong Consensus |
The discrepancy between the SD (standard deviation) and IQR (interquartile range) occurs because SD and IQR measure consensus differently. While the SD accounts for the spread of all expert rankings, giving a general idea of agreement levels. IQR focuses on the middle 50% of the data, depicting the spread of the middle half of the distribution. Thus, SD showed that 10 criteria had moderate consensus, while IQR refined this by revealing that only 3 of those 10 had significant dispersion in expert ratings. The other 7 criteria had some variation but were still within acceptable agreement ranges when assessed using IQR.
Furthermore, previous research supports the use of IQR in Delphi studies as an alternative or complementary measure to standard deviation, particularly when sample sizes are small, and data distribution may not be perfectly normal (Keeney et al., 2010). Given our study's focus on refining problem scenarios in PBL-supported makerspaces, IQR provided a more reliable statistical measure to interpret consensus trends, ensuring that the derived criteria are both rigorous and practically applicable for future instructional design.
In this study, the Delphi technique was utilized to establish expert consensus on the design criteria for problem scenarios in a PBL-supported makerspace learning environment, grounded on the Tan-Oon-Seng (2003) PBL framework. A panel of four experts participated in the process by ranking and voting on 21 design criteria, after which mean values and standard deviations were calculated to assess consensus, and additionally, IQR was performed to assess the spread of responses for each PBL criterion.
The initial threshold for consensus was set at 75%, in line with existing literature, where consensus thresholds typically range between 50% and 97% depending on the context (Diamond et al., 2014; Foth et al., 2016). However, based on the first round of analysis, 52% of the criteria (11 out of 21) achieved complete agreement (SD = 0). These criteria include critical aspects such as real-world relevance, problem-solving, team skills, moderate difficulty, medium complexity, and integration of multiple knowledge domains. The remaining 48% of the criteria demonstrated moderate variation (SD ≤ 0.5), suggesting areas for potential refinement.
This refinement process, which combined ranking, standard deviation, and IQR, provided a structured approach to determine expert consensus levels. Applying IQR demonstrated that IQR was a valuable addition in validating and strengthening the consensus findings. IQR provided a more reliable statistical measure to interpret consensus trends, ensuring that the derived criteria are both rigorous and practically applicable for future instructional design.
Given the time constraints and the immediate need to implement the refined criteria in the pilot program for middle school, the decision was made not to proceed with further Delphi rounds. Instead, the 52% consensus achieved in the first round is considered acceptable for this phase, particularly as it surpasses the minimum thresholds reported in studies that have utilized the Delphi method in educational research. The feedback provided by the panel during the first round will be used to address the moderate consensus criteria, ensuring that the PBL scenarios are adequately structured and aligned with the intended learning outcomes.
The findings indicate a solid foundation for the pilot program, with over half of the design criteria achieving strong consensus and the remainder offering actionable insights for improvement. The next phase will involve a small-scale pilot implementation, integrating both expert-driven refinements and student feedback. Since the moderate consensus criteria require further validation, the pilot study will focus on evaluating these areas through direct student engagement, gathering qualitative and quantitative insights to assess their feasibility and effectiveness in real-world learning environments.
Following the pilot, a larger-scale study will be conducted, incorporating both a pre-test and post-test design to quantitatively measure learning gains and assess the impact of the refined problem scenarios on students' knowledge acquisition and problem-solving skills. By integrating expert consensus with student-centered evaluation, this two-phase approach ensures that the final PBL problem scenarios are both pedagogically robust and practically effective for makerspace learning environments.
Furthermore, findings also suggest bridging the gaps for STEM participation by ensuring that problem-based tasks are engaging, appropriately challenging, and interdisciplinary. The criteria that met strong consensus emphasize real-world relevance, inquiry-driven learning, and interdisciplinary knowledge application. These elements scaffold learning for students with varying abilities, ensuring that even average students can meaningfully engage with STEM problem-solving (Hmelo-Silver, 2004).
Additionally, research suggests that problem complexity must be structured appropriately to maintain cognitive challenge without giving an overwhelming feeling among learners with different skill levels (Jonassen, 2011).
By adopting a pragmatic approach that leverages the first-round findings and integrates student feedback in the second phase, the study ensures a balance between methodological rigor and practical implementation needs. This iterative refinement process aims to enhance the alignment of PBL design with both expert recommendations and student experiences, ultimately strengthening the learning outcomes in makerspace education.
A potential limitation of this study is the variation in expert backgrounds and their experiences with different student populations. The diversity of the expert panel provided valuable insights but also introduced potential variations in ratings due to differences in teaching experiences and student populations. One expert, having worked extensively with gifted students, may have evaluated problem scenarios with a higher expectation for complexity and independent problem-solving. Conversely, the other experts, who primarily worked with students from socioeconomically disadvantaged backgrounds, may have prioritized accessibility, structured guidance, and differentiated instruction when assessing the criteria. These differences in perspective could have influenced the ratings and consensus thresholds, particularly for criteria related to problem difficulty and scaffolding. While the diversity of expertise enriched the findings, future studies should consider a more balanced expert panel to ensure that the consensus represents a broader spectrum of educational contexts.
The author would like to express sincere gratitude to Dr. Pi-Sui Hsu, dissertation advisor, for her continuous mentorship, guidance, and constructive feedback throughout the development of this study. Her support was instrumental in refining the design and development of this study.
Table 2
Summary of Problem Task Broken Down into Activities Day Wise
Activities | Introduction | Practice task | Exploration task | Final challenge | Reflection and feedback |
Day 1 | Problem scenario – Moving into new community | Task 1- Design your dream house – pen paper | Task 2 – Build a 3D model of your house and Team journal | Integration of lights and sensors in 3D house at this stage, we will ask students to tape or hang the LED lights and light sensor in best position in their constructed house and run the final code again so see whole structure | Task 3 Individual Reflection and journaling with |
Day 2 | Issues in community – Power outrage and dark residential. You want to ensure that lighting is automatically turned on outside/at the door once it becomes dark | Task 1- Introducing single color LED light: (a) write program (b) unplugged activity: write and practice with team in paper (c) Plugged activity: execute application via Snap! programming to activate Lights (c) Team journal | Task 2- Introduction to light sensor: Write a program for light sensor to control single color LED light. Task (a): unplugged activity – record codes and brainstorm on paper (b) Plugged: execute application via Snap! programming to activate Lights | Challenge: Program your light sensor to turn on multiple single color LED lights within one second difference at three different places /rooms in your house when its dark else turn off all LED lights | Task 3: Individual journal. |
Day 3 | You want to safeguard the house by developing an alarm system to indicate danger or intruder’s alert | Task 1- Introduction to TRI-color LED lights: (a) write program to turn TRI color from red to blue (b) unplugged: record on paper (c) plugged: execute via Snap! programming (d) Team journal | Task 2: Introduce distance sensor-If and else condition statement. (a) if the object is near to a distance sensor in a distance of less than 20 cm, then turn on red light, else turn on blue light. (b) Unplugged: practice and brainstorm on paper with team (c) Plugged: execute via Snap! programming (d) Team journal | Challenge 1: Write a program that can change TRI-COLOR LED lights from purple to teal to green every second. Challenge 2 - Write a IF ELSE command? IF – Condition 1 – the object/someone is less than 20 cm away from distance sensor then turn on RED color TRI-LED light plus intruder alert graphic and a play sound for intruder alert ELSE – Condition 2- if the object/someone is between 20 cm to 30 cm away from the distance sensor then turn on GREEN color TRI-LED light plus warning graphic image and play sound warning, else turn off all Blue COLOR TRI LED lights. | Task 3: Reflection and individual journal |
Day 4 | You notice an intruder approaching your house and trying to break in. How would you escape safely? | Task 1- Introduction to Rotation servo. Write script to program your rotation servo to move clockwise at maximum speed for 2 seconds and then pause for 2 seconds? (a) Unplugged: Practice and brainstorm on paper with team (b) Plugged: execute via Snap! programming (c) Revision of single color LED (d) Team journal | Task 2- Introduction to sound sensor, input and output concept and if and else condition application. (a) write a command to program your sound sensor to activate your single-color LED light when the sound is high IF – Condition 1 – the sound sensor detects sound level value greater than 70, then turn on single-color LED light to maximum brightness (100) ELSE – Condition 2- turn off single-color LED light (0) (b) unplugged: practice and brainstorm with team (c ) Plugged: execute via snap! programming (d) Team journal | Challenge: Write a command when the sound sensor value is greater than 70 then turn on single-color LED light to 100% brightness else reduce the brightness of single-color LED light to 20%? IF – Condition 1 – the sound sensor detects sound level value greater than 70, then turn on single-color LED light light to maximum brightness ELSE – Condition 2- reduce the brightness of single-color LED light to 20% Final challenge – Combining sound sensor, rotation servo, and the single-color LED lights to safely exit the house when the intruder broke into the house IF – Condition 1 – the sound sensor detects sound level greater than 70, then turn on single-color LED light to maximum brightness and quickly move the rotation servo to maximum speed clockwise ELSE – Condition 2- turn off the single-color LED light | Task 3: Reflection and individual journal |
.